Speed Control of 3 Phase Induction Motor
A 3-phase induction motor is practically a constant-speed machine. The speed regulation of an induction motor (having low resistance) is usually less than 5% at full-load.
In these motors, speed reduction is accompanied by a corresponding loss of efficiency and much speed regulation. Different methods by which speed control of induction motors is achieved, may be grouped under two main headings:-
1. Control from stator side
- by changing the applied voltage
- by changing the applied frequency
- by changing the number of stator poles
2. Control from rotor side
- rotor rheostat control
- by operating two motors in cascade
- by injecting an e.m.f. in the rotor circuit.
A brief description of all these methods is as under:-
Changing the Applied Voltage
This method, though the cheapest and the easiest, is rarely used because
- a large change in voltage is required for a relatively small change in speed
- this large change in voltage will result in a large change in the flux density thereby seriously disturbing the magnetic conditions of the motor.
This method is only applicable for small motors and for fan type loads where the load torque increases with the speed. The motor tends to get overheated with other loads. It is a commonly used method for ceiling fans driven by single-phase induction motors which have large standstill impedance limiting the current drawn by the motor.
Changing the Applied Frequency
This method is also used very rarely. We have seen that the synchronous speed of an induction motor is given by Ns = 120 f/P. Clearly, the synchronous speed (and hence the running speed) of an induction motor can be changed by changing the supply frequency f.
However, this method could only be used in cases where the induction motor happens to be the only load on the generators, in which case, the supply frequency could be controlled by controlling the speed of the prime movers of the generators.
But, here again the range over which the motor speed may be varied is limited by the economical speeds of the prime movers. This method has been used to some extent on electrically driven ships.
Changing the Number of Stator Poles
This method is easily applicable to squirrel-cage motors because the squirrel-cage rotor adopts itself to any reasonable number of stator poles.
From the equation Ns = 120 f/P, it is clear that the synchronous (and hence the running) speed of an induction motor can be changed by changing the number of stator poles.
This change of number of poles is achieved by having two or more entirely independent stator windings in the same slots. Each winding gives a different number of poles and hence different synchronous speed.
For example, a 36-slot stator may have two 3-φ windings, one with 4 poles and the other with 6-poles. With a supply frequency of 50-Hz, 4-pole winding will give Ns = 120 × 50/4 = 1500 r.p.m. and the 6- pole winding will give Ns = 120 × 50/6 = 1000 r.p.m.
Motors with four independent stator winding are also in use and they give four different synchronous (and hence running) speeds. Of course, one winding is used at a time, the others being entirely disconnected.
This method has been used for elevator motors, traction motors and also for small motors driving machine tools.
Speeds in the ratio of 2:1 can be produced by a single winding if wound on the consequent-pole principle. In that case, each of the two stator windings can be connected by a simple switch to give two speeds, each, which means four speeds in all.
For example, one stator winding may give 4 or 8-poles and the other 6 or 12-poles. For a supply frequency of 50-Hz, the four speeds will be 1500, 750, 1000 and 500 r.p.m.
Another combination, commonly used, is to group 2- and 4-pole winding with a 6- and 12-pole winding, which gives four synchronous speeds of 3000, 1500, 1000 and 500 r.p.m.
Rotor Rheostat Control
In this method (Fig. 1), which is applicable to slip-ring motors alone, the motor speed is reduced by introducing an external resistance in the rotor circuit.
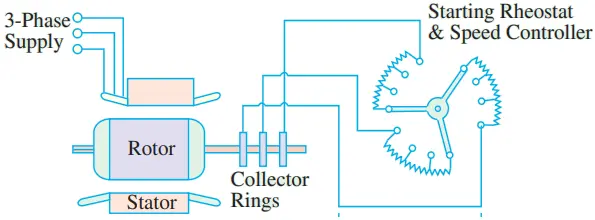
For this purpose, the rotor starter may be used, provided it is continuously rated. This method is, in fact, similar to the armature rheostat control method of d.c. shunt motors.
Near synchronous speed (i.e. for very small slip value),
T ∝ s/R2
It is obvious that for a given torque, slip can be increased i.e. speed can be decreased by increasing the rotor resistance R2.
- One serious disadvantage of this method is that with increase in rotor resistance, I2R losses also increase which decrease the operating efficiency of the motor. In fact, the loss is directly proportional to the reduction in the speed.
- The second disadvantage is the double dependence of speed, not only on R2 but on load as well.
Because of the wastefulness of this method, it is used where speed changes are needed for short periods only.
Cascade or Concatenation Operation
In this method, two motors are used (Fig. 2) and are ordinarily mounted on the same shaft, so that both run at the same speed (or else they may be geared together).
The stator winding of the main motor A is connected to the mains in the usual way, while that of the auxiliary motor B is fed from the rotor circuit of motor A.
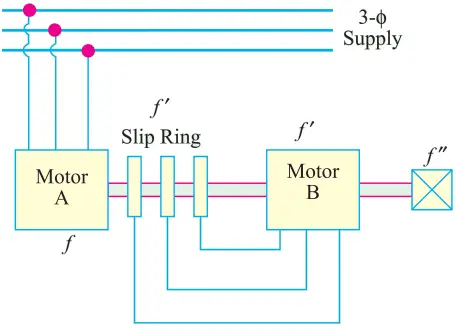
For satisfactory operation, the main motor A should be phase-wound i.e. of slip-ring type with stator to rotor winding ratio of 1:1, so that, in addition to concatenation, each motor may be run from the supply mains separately.
There are at least three ways (and sometimes four ways) in which the combination may be run.
1. Main motor A may be run separately from the supply. In that case, the synchronous speed is
Nsa = 120f/Pa
Where Pa = Number of stator poles of motor A.
2. Auxiliary motor B may be run separately from the mains (with motor A being disconnected). In that case, synchronous speed is
Nsb = 120f/Pb
Where Pb = Number of stator poles of motor B.
3. The combination may be connected in cumulative cascade i.e. in such a way that the phase rotation of the stator fields of both motors is in the same direction. The synchronous speed of the cascaded set, in this case, is
Nsc = 120f/(Pa + Pb).
4. The fourth possible connection is the differential cascade. In this method, the phase rotation of stator field of the motor B is opposite to that of the stator of motor A.
This reversal of phase rotation of stator of motor B is obtained by interchanging any of its two leads. For this method of connection, the synchronous speed of the set is
Nsc = 120f/(Pa − Pb)
As the differentially-cascaded set has a very small or zero starting torque, this method is rarely used. Moreover, the above expression for synchronous speed becomes meaningless for Pa = Pb.
How the Set Starts?
When the cascaded set is started, the voltage at frequency f is applied to the stator winding of machine A. An induced e.m.f. of the same frequency is produced in rotor A which is supplied to auxiliary motor B. Both the motors develop a forward torque.
As the shaft speed rises, the rotor frequency of motor A falls and so does the synchronous speed of motor B. The set settles down to a stable speed when the shaft speed becomes equal to the speed of rotating field of motor B.
Considering load conditions, we find that the electrical power taken in by stator A is partly used to meet its I2R and core losses and the rest is given to its rotor.
The power given to rotor is further divided into two parts:-
- one part, proportional to the speed of set i.e. N is converted into mechanical power
- and the other part proportional to (Nsa − N) is developed as electrical power at the slip frequency, and is passed on to the auxliary motor B, which uses it for producing mechanical power and losses.
Hence, approximately, the mechanical outputs of the two motors are in the ratio N : (Nsa − N). In fact, it comes to that the mechanical outputs are in the ratio of the number of poles of the motors.
Injecting an E.M.F. in the Rotor Circuit
In this method, the speed of an induction motor is controlled by injecting a voltage in the rotor circuit, it being of course, necessary for the injected voltage to have the same frequency as the slip frequency. There is, however, no restriction as to the phase of the injected e.m.f.
When we insert a voltage which is in phase opposition to the induced rotor e.m.f., it amounts to increasing the rotor resistance, whereas inserting a voltage which is in phase with the induced rotor e.m.f., is equivalent to decreasing its resistance.
Hence, by changing the phase of the injected e.m.f. and hence the rotor resistance, the speed can be controlled.