The performance of a DC motor can be judged by its characteristics and a motor for any particular application can be selected easily. The performance characteristics of DC motor are:
- Torque versus armature current (T v/s Ia)
- Speed versus armature current (N v/s Ia)
- Torque versus speed (T v/s N)
Characteristics of DC Motor
While discussing the DC motor characteristics, the following two relations should always be kept in mind:
- Ta ∝ ΦIa and
- N ∝ EbΦ
Characteristics of DC series Motor
Torque – Current characteristics (T v/s Ia): For a series motor,
- Torque α Armature current x Field flux
- i.e. T α Iaφ
Before saturation, φ α Ia
- Therefore, before saturation T α Ia2
After magnetic saturation of the core, flux (φ) is independent of Ia i.e. flux does not increase with an increase in armature current.
- Therefore after saturation, T α Ia
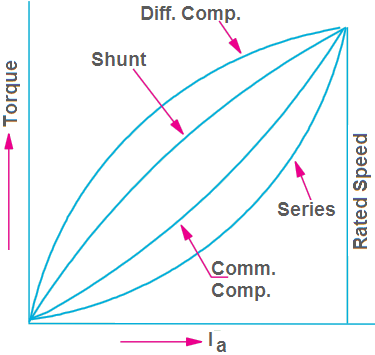
Therefore, on light loads, the torque produced by the series motor is proportional to the square of the armature current, and hence curve drawn between torque and armature current up to magnetic saturation is a parabola.
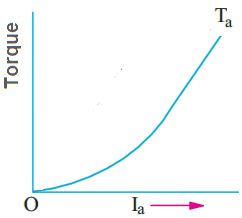
But after magnetic saturation flux φ is independent of excitation current and so torque is proportional to Ia and hence characteristics become a straight line.
So we conclude that (before magnetic saturation) on heavy loads, a series motor exerts a torque proportional to the square of armature current.
Hence, in cases where huge starting torque is required for accelerating heavy masses quickly as in hoists and electric trains, etc., series motors are used.
Speed – Current Characteristics (N v/s Ia): We know that
Eb = (PφNZ)/60A
or N = (60AEb)/PφZ
In the above equation, all quantities are constant except Eb and φ. Therefore,
N α Eb / φ
also Eb = V – Ia Ra
- Therefore, N α (V – IaRa) / φ
In a DC series motor, initially, the field flux φ rises in proportion to the current but after saturation, it is independent of the armature current.
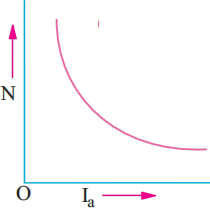
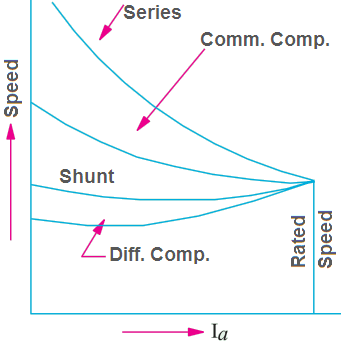
Consequently, speed N is roughly proportional to the current. The speed may become dangerously high if the load reduces to a small value.
Hence, a DC series motor should not be operated without load. DC series motors are always connected to loads by gears so that minimum load is always maintained to keep the speed within safe limits.
Speed – Torque Characteristics (N v/s T): Since a series motor develops high starting torques at low speeds and low torque at high speeds, therefore, speed – torque characteristics of a DC series motor is a hyperbola.
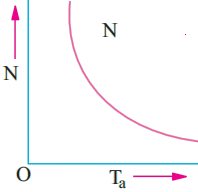
High starting torque enables, even a small series motor to start a heavy load. Therefore, DC series motors are used where high starting torque is required like hoists, cranes, electrical locomotives, elevators, etc.
DC Shunt Motor Characteristics
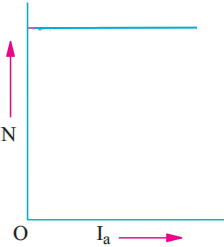
Torque – Current Characteristics (T v/s Ia): We know that, T α Iaφ
But the flux of a shunt motor is practically constant. Therefore,
- T α Ia
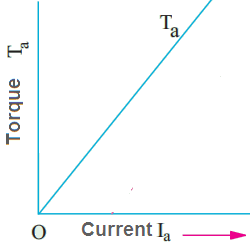
Therefore, the torque-current characteristic of a shunt motor is a straight line passing through the origin. Although the field current remains practically constant, the field flux becomes slightly weaker at heavy loads, due to armature reaction, hence the curve bends slightly bends at heavy loads.
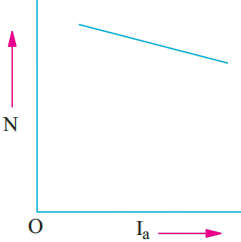
Speed Current Characteristic (N v/s Ia): The back EMF of the shunt motor is given by
Eb = V – IaRa = (PφNZ)/60A
Because P, N, Z, and A are constant
Therefore, Eb α Nφ
or V – IaRa α Nφ
- or N α (V – IaRa)/φ …….(1)
The field flux of the shunt motor is almost constant. Therefore, the numerator of RHS of equation (1) decreases with an increase in load (or Ia).
So there is a little fall in speed with the increase in load, hence the curve bends slightly as the load is increased due to increased IaRa voltage drop.
Speed – Torque Characteristics (N v/s T): The speed torque characteristics are similar to speed current characteristics.
Because there is no appreciable change in the speed of a shunt motor from no-load to full-load, it may be connected to loads that are totally and suddenly thrown off without any fear of excessive speed resulting.
These motors are used where constant speed and low starting torque are required like centrifugal pumps, fans, blowers, conveyors, etc.
Due to the constancy of their speed, shunt motors are suitable for driving shafting, machine tools, lathes, wood-working machines, and for all other purposes where an approximately constant speed is required.
DC Compound Motor Characteristics
In the case of a cumulative compound motor, as the armature current increases, the series flux increases, so the flux per pole increases.
But T α Iaφ
Consequently, the torque also increases; however, this increase in torque is greater than that of the shunt motor.
In cumulative compound motors, the series field aids the shunt field, so flux per pole increases as the armature current increase and hence speed decreases.
Such machines are used where series characteristics are required and where, in addition, the load is likely to be removed totally such as in some types of coal-cutting machines or for driving heavy machine tools which have to take sudden cuts quite often. Due to shunt windings, speed will not become excessively high but due to series windings, it will be able to take heavy loads.
In conjunction with fly-wheel (functioning as load equalizer), it is employed where there are sudden temporary loads as in rolling mills. The fly-wheel supplies its stored kinetic energy when the motor slows down due to a sudden heavy load. And when due to the removal of the load motor speeds up, it gathers up its kinetic energy.
Compound-wound motors have the greatest application with loads that require high starting torques or pulsating loads (because such motors smooth out the energy demand required of a pulsating load). They are used to drive electric shovels, metal-stamping machines, reciprocating pumps, hoists, compressors, etc.
Whereas in the case of a differential compound motor, the series field opposes the shunt field so the total flux of such motor decreases with an increase in current (i.e. load).
Hence in a differential compound motor, torque increases with an increase in current.
Also, flux per pole decreases as the armature current increase, and hence speed increases.
In a differential compound motor, the motor speed will increase with an increase in the load, which leads to an unstable operation. Therefore, a differential compound motor is rarely used for any practical application.
Thanks for reading about “characteristics of DC motor”.