Hi friends, in this article, I am discussing the vfd working principle and hope you will find it very help full and informative.
The squirrel-cage induction motors are the most common three-phase motors used in industrial applications. The preferred method of speed control for squirrel-cage induction motors is to vary the frequency of the supply voltage, and the system used for this purpose is known as variable frequency drives or VFD.
VFD Working Principle
A variable frequency drive controls the speed, torque, and direction of an AC induction motor. It takes fixed voltage and frequency from AC input and converts it to a variable voltage and frequency AC output.
As the frequency of the voltage is reduced, the inductive reactance of the motor stator winding is also reduced.
Therefore, in VFD, voltage applied to motor is also reduced with frequency to prevent the motor from being damaged by excessive current.
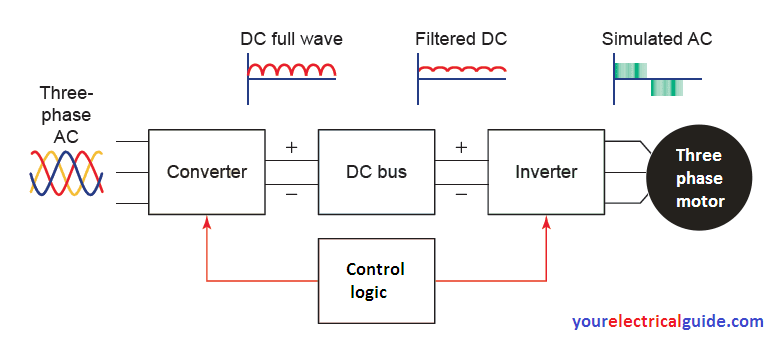
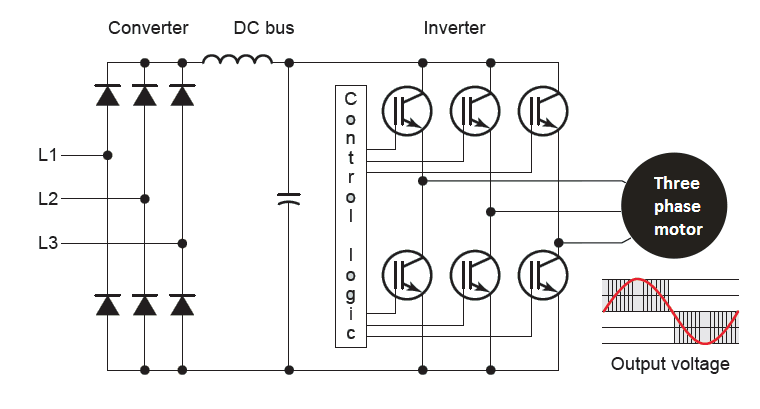
Most VFDs operate by first changing the AC voltage into DC, and then DC is changed back to AC at the desired frequency. In the figure, a VFD block diagram is shown. The function of each block is as follows:
Converter: It is a bridge rectifier circuit that converts the applied AC to DC.
DC bus: Also referred to as a DC link, it filters the rectified output and connects it to the input of the inverter.
Inverter: The inverter takes the filtered DC from the DC bus and converts it into three-phase AC
Control logic: The control logic system generates the necessary pulses used to control the output of the power semiconductor devices used in the inverter block in the proper sequence. An embedded microprocessor is used for all internal logic and decision requirements.
Volts per Hertz
The volts per hertz technology is the most economical and easiest method of speed control of induction motors. In this method, drive controls shaft speed by varying the voltage and frequency of the signal powering the motor.
In volts per hertz technology, when the frequency of supply changes, the voltage applied to the motor is also changed by the same amount as the frequency, in order to prevent overheating of the motor. In other words, drive maintains a constant V/Hz ratio. Volts per hertz drives work well on all applications in which the load is predictable and does not change quickly.
The ratio between voltage and frequency is called volts per hertz (V/Hz). To find the volts per hertz ratio, divide the rated nameplate voltage by the rated nameplate frequency. For example, the volt per hertz ratio for a 415 Volt, 50Hz will be 8.3 V/Hz.
In the variable frequency drives IGBTs are used up to 500 HP over this capacity, SCRs or GTOs are used because SCRs and GTOs have the ability to handle a greater amount of current than IGBTs. But in such VFDs, high voltage spikes can cause damage to the motor; therefore especially designed inverter rated motors are used with SCR VFDs. Motors used with VFDs should have
- more stator winding insulation so that it can withstand high voltage spikes,
- batter cooling system to maintain sufficient airflow to cool the motor at reduced speed.
A variable-frequency drive and AC squirrel cage motor are cheaper than a comparable DC drive and DC motor and can give the same speed and torque characteristics. They require less maintenance also. Therefore DC drives and DC motors are being replaced by VFDs.
VFD drives should be mounted near the motor. Excessive cable length between the VFD and the motor can result in extremely high voltage spikes at the motor leads. It is important to verify the maximum cable distance stated in the drive specifications, especially non-inverter-duty motors.
Line and Load VFD Reactors
A VFD reactor, as shown in figure, is basically an inductor installed on the input or output of the drive.
Line reactors stabilize the current waveform on the input side of a VFD, reducing harmonic distortion and the burden on upstream electrical equipment. Harmonics are high-frequency voltage and current distortions within the power system. VFDs produce harmonics when they convert AC to DC and DC back to AC. By absorbing line spikes, line and load reactors can prevent over-voltage and under-voltage tripping problems.
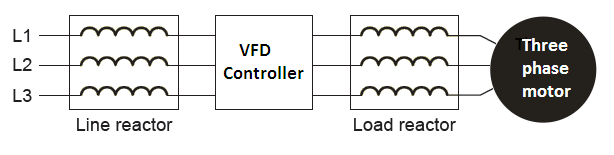
Load reactors, connected between the VFD and motor, will absorb high voltage spikes and reduce motor heating and audible noise. A load reactor helps to extend the life of the motor and increase the permittable distance between motor and drive.
VFD Basic Adjustments
The following are some important adjustments that are done in VFDs. In some units, these can be adjusted by setting potentiometers on the main control board. Other units are completely digitally controlled.
Ramping Time: VFDs have good control over acceleration and de-acceleration, which is also known as “ramping.” Acceleration and de-acceleration time of a VFD can be set by setting its ramping time.
Current Limit: This control sets the maximum amount of current that can be delivered to the motor.
Volts per Hertz: This sets the voltage per hertz ratio.
Maximum Hz: This control sets the maximum speed of the motor. Most motors are designed to operate between 0 and 50 Hz, but some drives permit the output frequency to be set above 50 Hz, which would permit the motor to operate at higher than normal speed. The maximum hertz control can also be set to limit the output frequency to a value of less than 50 Hz, which would limit the motor speed to a value less than normal.
Minimum Hz: This sets the minimum speed the motor is permitted to run.
Thanks for reading about the “vfd working principle.” For more details, visit Wikipedia.
thank for explaining VFD working principle