The relay operation is a function of the input quantities, such as current, voltage, impedance, and/or phase angle. The relay can be made to respond to either a single quantity or a combination of two or all input quantities.
When the relay is operated by a single quantity, its response is strictly a function of time, whereas when the relay is operated upon by two or more quantities, its operation is a function of the relative magnitude and phase angle difference of those quantities.
Each relay then can be made to respond to its input quantities, known as the operating or relay characteristics. Relay characteristics are very useful in determining the relay setting, which in turn will determine relay speed, sensitivity, and selectivity for protection from power system short-circuits.
Relay application practices can be classified according to relay characteristics and the special requirements of various elements. They are discussed next.
Overcurrent Relays
When excessive current flows in a circuit, it is necessary to trip the circuit breaker protecting that circuit. This type of protection is usually provided by either time delay or instantaneous overcurrent relays.
The instantaneous relay, although inherently fast, requires a short time to operate, whereas time-delay relays have an intentional time delay built into them to provide coordination with other overcurrent relays for selectivity.
The selectivity is obtained by adjustment of current setting (sensitivity) and time, using the most applicable of several time characteristics. The relay time characteristics differ by the rate at which the time of operation of the relay decreases as the current increases.
The time characteristics for each family of overcurrent relay consist of inverse, very inverse, extremely inverse, definite time, short time, and long time. These curves are shown in Figure.
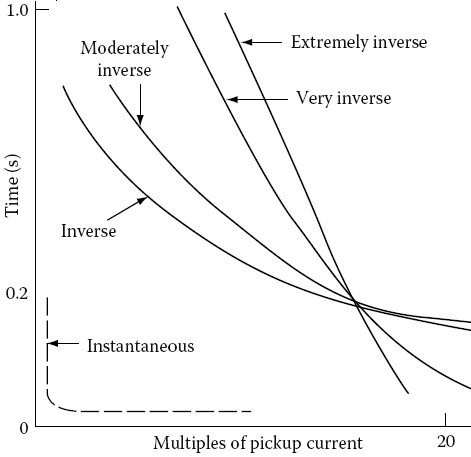
The application of overcurrent relay is generally more difficult and less permanent than that of other types of relaying. This is because the operation of overcurrent relays is affected by variations of short-circuit current magnitudes. These magnitude variations in short-circuit currents are caused by changes in power system elements, operation, and system configuration.
Over–Under Voltage Relays
The over-under voltage relays have characteristics similar to the overcurrent relays. The actuating quality in the operating element is voltage instead of current. Voltage relays often combine the under–overvoltage elements in one relay, with contacts for either an undervoltage or overvoltage condition.
These relays may be used to trip the breaker or sound an alarm in case of the voltage exceeds a predetermined limit or falls below a predetermined value.
Directional Relays
Directional relays are used when it is desirable to trip the circuit breaker for current flow in one direction only. That is, the direction is made responsive to the directional flow of power or current. This is achieved by making the relay distinguish certain differences in phase angle between current and reference voltage or current.
The directional relay has a current winding and directional winding. The current winding is connected to the CT, whereas the directional winding is connected to the VTs to provide the circuit voltage for polarizing the unit.
Therefore, the pickup of the relay is dependent on the magnitude of current and voltage and the phase relationship between them. The directional relay thus establishes one boundary of the protected zone; that is, it protects the circuit only in one direction.
Directional relaying is often used where coordination becomes a problem, such as in tie lines between two supply substations or to provide protection against the motoring of a generator.
Current- or Voltage-balance Relays
Current-balance relays compare the magnitudes of current (or voltage) in two circuits (where these quantities vary within restricted limits) to detect an abnormal condition. The current-balance relay has two torque-producing elements actuated by currents (or voltage) from two different circuits or phases.
Current-balance relaying between the phases of a motor is used to protect the machine against overheating in case of phase currents become unbalanced owing to short-circuits or fuse blowing. The current balance can be set with sufficient time delay to provide coordination with other relaying.
Distance Relaying
The principal application of distance relaying is for transmission lines. A distance relay operates by comparing the voltage with the current at its location that is measuring the impedance of the line.
The relay is designed to operate whenever the impedance under an abnormal condition becomes less than a predetermined value. Since the impedance is a function of line length, the relay operates when a fault (short-circuit) occurs within the given length of line that the relay is set to protect. Distance relays are built in three different types:
- impedance,
- admittance (mho), and
- reactance.
Differential Relaying
As long as the current flow through the protected component is unchanged in magnitude and phase, the relay does not pick up. Such a condition would occur for a short-circuit fault outside the zone of relay protection.
However, should a fault occur inside the zone of relay protection (that is, between the CTs), the differential relay would receive current in the operating coil. To obtain differential protection, almost any relay type can be used. However, differential relays are constructed to provide very sophisticated, fast short-circuit protection.
A differential relay has two restraint coils, or more, and an operating coil. The restraint coils prevent the undesired relay operation for fault outside the differential zone, as well as CT errors. Maximum restraint is produced if the current is in the same direction in the two restraint coils, and minimum restraint is produced if currents are in opposite directions in the two restraint coils.
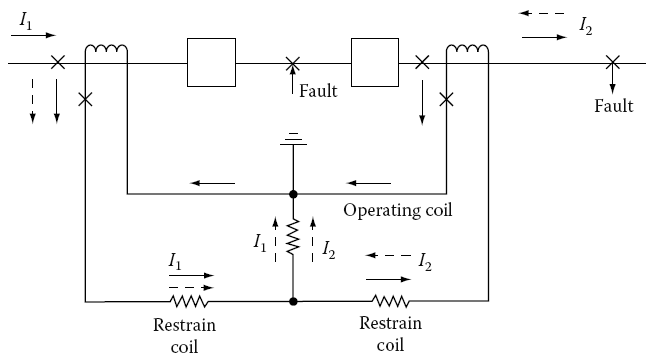
The current flowing through the operating coils (i.e., I1 − I2) must exceed a certain percentage of the through current (I2) before the relay will operate. Because it is inherently selective, differential relaying is used as primary relaying on power system components and equipment.
Pilot Wire Relaying
Pilot wire relaying is a form of differential relaying normally used for the protection of longer lines. The pilot wire employs a wire channel to compare currents entering and leaving the protected line between two terminals. The wire pilot channel can consist of the following:
- Wire pilot, consisting of a two-wire circuit between the ends of the line.
- Carrier-current pilot, wherein one conductor of the line and the earth comprise a pilot circuit for superimposed high-frequency currents.
- Microwave pilot, which is an ultrahigh-frequency radio channel between the ends of the line.
For external faults, the currents are balanced at the two terminals of the line, whereas for internal faults the currents are not balanced and therefore relay pickup would occur.
Thanks for reading about “types of protective relays.”
Related Posts
- Lightning Arrester Types & Working
- Lightning and Switching Voltage Protection Methods
- Personnel Protective Devices
- How Lightning Arrester Works
- Overvoltage Protection by Lightning Arresters
- Insulation coordination of Electrical Equipment
- MCCB Circuit Breakers
- Differential Protection of Generator & Alternator
- Types of Current Limiting Reactor
- Classification | Types of Protective Relays
- Fuse Selection Criteria
- Protection of Transmission lines by Ground Wires