Hi friends,
In this article, I am providing you some basic information about Brushless DC motor i.e. BLDC motor. With the help of this information you can easily understand the BLDC motor working principle and operation.
The torque-speed characteristics and the flexibility of the dc motor have made it a very attractive choice for applications in control systems, robotics, and traction.
However, it comes with several disadvantages, such as commutators and brushes, which tend to wear out and must be serviced periodically. Then there is arcing at the trailing edges of the commutator segments, which is a definite fire hazard in the presence of volatile materials.
The development of the brushless dc motor is driven by the wish to eliminate the commutator and brushes while keeping the highly desirable characteristics of the dc motor.
BLDC Motor Working Principle
In a DC motor to keep the rotor turning the commutator/brush mechanism acts as a mechanical switch that ensures that the currents in the armature coils are reversed at the appropriate time to maintain the torque in the chosen direction.
What is required to convert the normal dc motor into a brushless motor is a system to replace the commutator/brush mechanism with a sensor that senses the position of the coils and a switch to change the direction of the current in the coils at the appropriate time. In the brushless dc motor, the sensing and switching are done electronically.
This electronic commutation arrangement eliminates the commutator arrangement and brushes in a DC motor and hence more reliable and less noisy operation is achieved.
The angular position sensor uses a Hall effect transducer or an optical sensor to determine which coils should be energized. This information, together with the speed setting, is fed to the pulse generator that drives the microcircuit source, which in turn supplies the current to the stator.
It is very important to keep the inductance of the stator windings as low as possible to minimize the energy stored when the coil is energized. This energy has to be dissipated when the current is switched off, and commutation is easier when the stored energy is low.
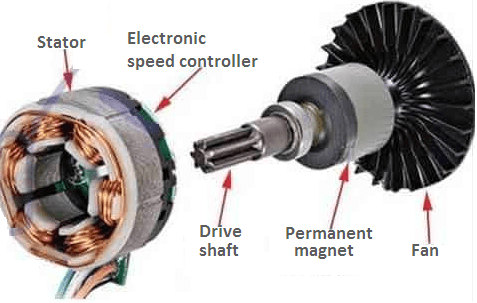
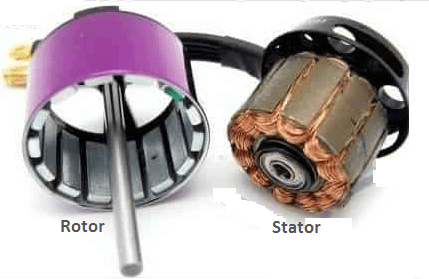
Construction of BLDC Motor
Unlike a conventional dc motor, a brushless dc motor has an “inside-out” construction, that is, the field poles rotate and the armature is stationary. The field poles consist of permanent magnets mounted on the inside of a steel cylinder and the armature is wound on a slotted laminated iron structure.
The armature coils are switched by transistors or SCRs (instead of the commutator) at the correct rotor position to maintain the armature field in space quadrature with the field poles.
BLDC motors can be constructed in different physical configurations. Depending on the stator windings, these can be configured as single-phase, two-phase, or three-phase motors. However, three-phase BLDC motors with permanent magnet rotors are most commonly used.
Each type of BLDC motor is described by either the number of phases of the stator winding, current pulses delivered to the windings by the transistors or SCRs, or the number of poles on the rotor. The following classification of brushless dc motors is also useful to understand the BLDC motor working principle.
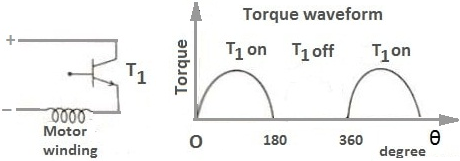
One Phase, One-pulse Brushless DC Motor
The stator of this motor has only a one-phase winding which is energized by a transistor once per electrical revolution. The torque output of such a motor is inadequate, because, at best, it can only produce a positive torque over 180 electrical degrees. The angular rotation remaining has to be overcome by the inertia of the rotor or by means of auxiliary torques.
One-phase, Two-pulse Brushless DC Motor
The stator of this motor has also a one-phase winding only but receives two pulses, that is, its winding is energized by two current pulses of opposite directions. The resulting torque distribution is, therefore, more favorable than with the one-pulse motor.
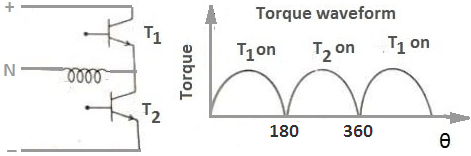
Still, a continuous electromagnetic torque is not achieved. There are still small regions without torque that have to be bridged with stable auxiliary means. The advantage of this motor is its simple design, yielding a high utilization of the armature material.
Two-phase, Two-pulse Brushless DC Motor
The stator of such a motor has two phase windings, which alternatively are energized by two current pulses. Therefore, the torque generated is the same as with a one-phase, two-pulse motor. Nevertheless, the winding will be utilized to 50 percent only.
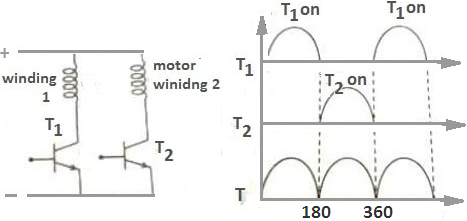
The advantage of this motor is to be seen in its simple control electronics. The gaps of the electromagnetic torque have to be bridged by suitable auxiliary means as with a one-phase motor.
Three-phase, Three-pulse Brushless DC Motor
This motor has a stator with a three-phase winding which is displaced in space by 120o electrical. Each phase winding is excited by one pulse, that is, per electrical revolution; three current pulses are fed cyclically to the stator.
The fact that only three power transistors or SCRs are required is the main advantage of this motor design. One disadvantage is the relatively low utilization of the winding (on average, nearly 33 percent) as well as the necessity of three position sensors.
Four-phase, Four-pulse Brushless DC Motor
The stator of this motor is wound with four-phase windings displaced in space by 90° electrical. The phase windings are energized cyclically with four current pulses. This results in torque without gaps and utilization of the winding up to 50 percent. However, the expenditure on electronics is twice that of the two-pulse design.
3 Phase 6 Pulse BLDC motor Working Principle
The stator of this motor is wound with three-phase windings which can be connected in delta as well as in star. Generally, the neutral point is not used. The windings are excited with six pulses by six power transistors or SCRs in a cyclic sequence.
Such a motor not only delivers an even torque output but also the utilization of the winding is at its optimum. Its disadvantage is the relatively high cost for the position sensors and the control electronics.
This leads to the most common brushless dc motor—a combination of a three-phase permanent magnet synchronous motor, three-phase solid-state inverter, and a rotor position sensor that results in a system producing a linear speed torque characteristic as in the conventional permanent magnet DC motor.
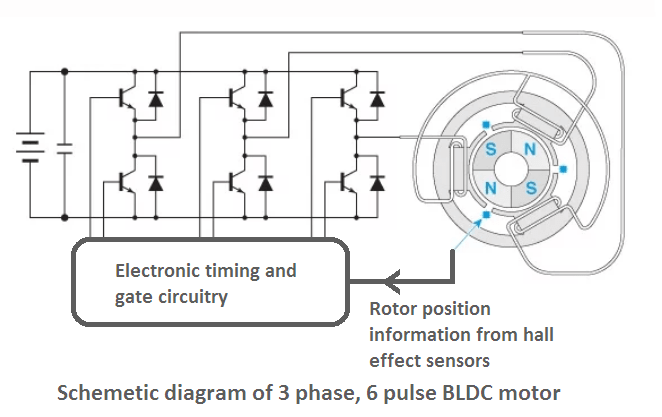
The above figure illustrates the schematic representation of a 3-phase, 6-pulse brushless DC motor using a transistor inverter as the DC to AC converter. Where high power requirements exist, SCRs are used instead of transistors.
Other trade of features like component cost, component reliability, and simplicity of the inverter circuitry is of importance where SCRs and transistors of comparable power handling capabilities are available.
An integral part of the brushless DC motor system is the rotor position sensor. Although several methods are available for sensing angular position, the most commonly used ones are Hall effect sensors and electro-optical sensors.
Advantages of Brushless DC Motor
- The brushless dc motor comes with all the advantages of the common dc motor but without the drawback of the mechanical switching system made up of the commutator and brushes.
- The rotor of the brushless dc machine has lower inertia compared to an equivalent dc machine since it has no windings and commutator. It is therefore a prime choice for applications in servo systems and for driving computer peripherals.
- Due to the absence of brushes BLDC motors are capable to run at high speeds. The efficiency of BLDC motors is typically 85 to 90 percent, whereas brushed DC motors are 75 to 80 percent efficient.
- Fewer problems are caused by radio frequency and electromagnetic interference and long life.
The major disadvantage is the complexity of the electronic control circuit, especially in applications where smooth rotation is required and hence a large number of coils have to be switched in sequence.
Applications of Brushless DC Motors
- In larger power applications including traction, brushless motors are fast replacing conventional dc motors.
- Another important application is for spindle drives for disc memories and computer peripherals.
- They are used in electric vehicles, hybrid vehicles, and electric bicycles, Industrial robots, CNC machine tools.
- In the fractional horsepower range, they are used in different types of actuators in advanced aircraft and satellite systems.
- Integral horsepower brushless dc motors have been developed for propulsion and precision servo systems.
Related Posts
- Construction of DC Motor | Machine
- Working Principle of DC Motor
- Types of DC Motor
- Speed Control of DC Motor
- Speed Control of DC Shunt Motor
- Speed Control of DC Series Motor
- Characteristics of DC Motor
- Electric Braking of DC Motor
- BLDC Motor Working Principle
- Operation of BLDC Motor
Thanks for reading about the “BLDC motor working principle”.